Für eine hochgenaue satellitengestützte Positionsbestimmung ist es notwendig, dass eine Fixed-Lösung (Zentimetergenauigkeit) erreicht wird. Diese Lösung ist abhängig von gelösten Mehrdeutigkeiten, welche wiederum von folgenden Faktoren abhängen:
- Unterbrechungen des Korrekturdatenstroms
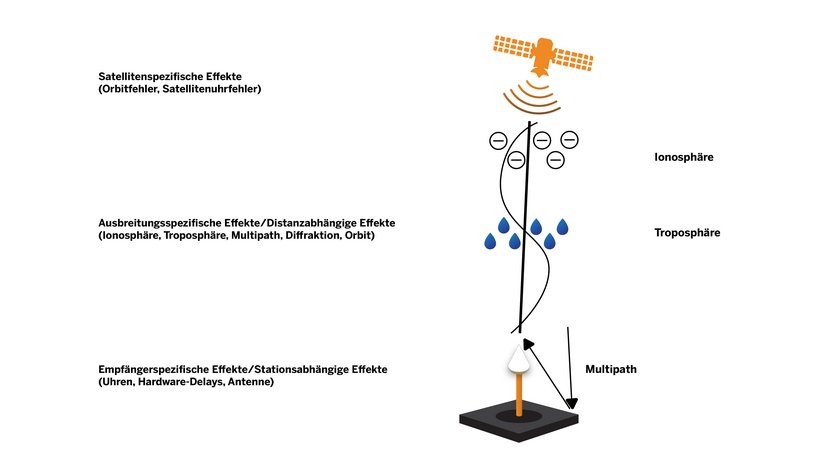
- Lokal sichtbare Satellitenkonstellation (Satellitengeometrie)
- Genutzte Satellitensysteme
- Ionosphärische und troposphärische Störungen
- Mehrwegeausbreitungen und Abschattungen (Signalreflexionen z. B. an Gebäuden)
- Nutzbare Frequenzen (Ein-, Zwei- oder Dreifrequenzempfänger)
- Hardwareeigenschaften (Signalaufbereitung, Verarbeitungsgeschwindigkeit, RTK Lösungsalgorithmen)
Zusätzlich:
- Firmware: Die von den GNSS-Herstellern regelmäßig angebotenen Firmware-Updates sollten zeitnah auf den Rover-Geräten installiert werden, um die Performance zu verbessern.
- Viele Empfängertypen fixen zuerst die GPS-Satelliten und danach GLONASS- und andere Satellitensysteme. Im Fall einer schwachen GPS-Konstellation/Geometrie oder einer hoch eingestellten Elevationsmaske (≥15 deg) kann das zu Fixing-Problemen führen.